Training and Execution Paradigms
- Centralized Training - a training paradigm where we only make use of all the information gathered by the agents in the entire system
- Decentralized Training - a training paradigm where we make use of only the local information of each agent.
- Decentralized Execution - the policies of the agents are only conditioned on their local history of observations
- Centralized Execution - the policies of the agents are conditioned based on the information gathered from all agents.
CTCE
-
CTCE - a special case is Centralized models involve each agent pooling experience feeding back to a single learner. Policies are them returned for local execution.
- In effect, we have more agents to help with experience
- All agents have similar policies
- We can have a local independent actor, but a centralized critic.
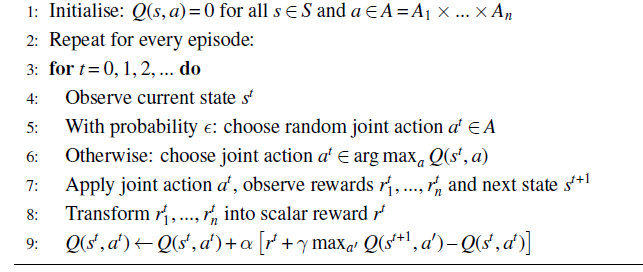
- This requires that we transform joint reward into a single scalar reward. This is a non-trivial task
- Another challenge is that it is less scalable especially when the action space grows exponentially with the number of agents.
- It also means that observations are not localized and training is based on globally gathered data
-
Centralized Q-learning is an approach to learning a policy for stochastic games where we maintain joint action values for joint actions. It is essentially Q-learning but on the joint actions and values
DTDE
-
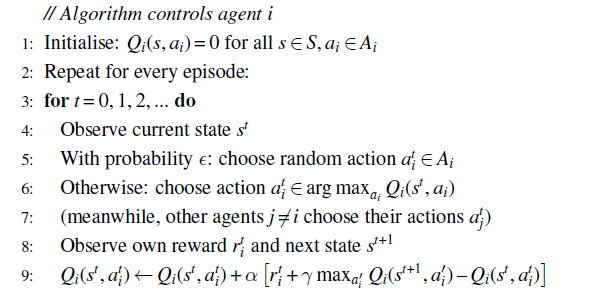
A special case is Independent Learning, where each agent learns its own policy using only its own local history of observations, actions and rewards, ignoring the existence of other agents.
-
This allows adaptation to local perception of the environment.
-
A decentralized approach helps when there is an asymmetry in what agents can do.
-
Each agent uses a copy of the same learning algorithm.
-
It avoids combinatorial explosion of action spaces
-
It can be used for problems that require local policies.
-
It does not require a reward function to be converted to a scalar function.
-
From the perspective of agent
, the other policies become a part of the environment’s state transition function -
They serve as good baselines which are SOTA.
-
We are unable to use standard experience replay buffers since the environment now has multiple agents.
-
Agents are unable to distinguish between non-stationarity due to other agents or due to the environment itself
-
From the perspective of the agent, the environment is non-stationary because each agent makes a decision that affects the environment. Learning is more unstable.
-
-
Another special case is Agent Modeling
-
Despite its simplicity, independent learning has been shown to perform competitively to more sophisticated algorithms in multi-agent deep RL
-
Independent Q-Learning is a similar approach to CQL but in the context of independent learning
- For certain classes of Stochastic games, an infinitesimal (using infinitely small learning steps) IQL is guaranteed to converge to a Nash Equilibrium. While, for others it may not converge at all or only under certain conditions.
Centralized Training Decentralized Execution
Fundamental Approaches to Independent Learning
-
Mixed Play - agents use different learning algorithms.
- Ad-hoc teamwork - agents collaborate with previously unknown agents whose behaviors may be unknown.
-
Some algorithms also bridge algorithm self-play and mixed play.