- MARL extension of PGM algorithms. They gradually vary the action probabilities within a learned policy.
IGA
-
We can perform Gradient Descent to update the policy towards maximizing the expected reward.
-
A variant is called infinitesimal gradient ascent (IGA) defined for two agents and two actions.
-
Assumption: Agents have knowledge of their reward matrix
-
In IGA, we update the gradient in an unconstrained manner and then project it so that it becomes a valid probability distribution.
-
IGA is not guaranteed to converge with a fixed learning rate. It will converge when we vary the learning rate and the overall step size is bounded. We follow the win or learn fast.
- If the agent is losing, it should try to adapt quickly (i.e., high learning rate)
- If the agent is winning it should adapt slowly since the other agent will adapt (i.e., low learning rate)
- Winning is determined by comparing the actual expected reward with the expected reward achieved by a Nash equilibrium policy.
- Mixed with IGA we call this WoLF-IGA and it is guaranteed to converge to a Nash Equilibrium in general-sum games with two agents and two actions.
WoLF-PHC
- WoLF-IGA is generalized to WoLF with Policy Hill Climbing which is applicable for a general sum game with any number of agents and actions. It also removes the requirement of knowledge about the reward function or policy
- It learns
as in standard Q learning - It makes use of an average policy
computed over past policies. Rationale: As in Fictitious play, the average policy will converge to a Nash equilibrium (in most cases). are the learning rates for losing and winning.
- It learns
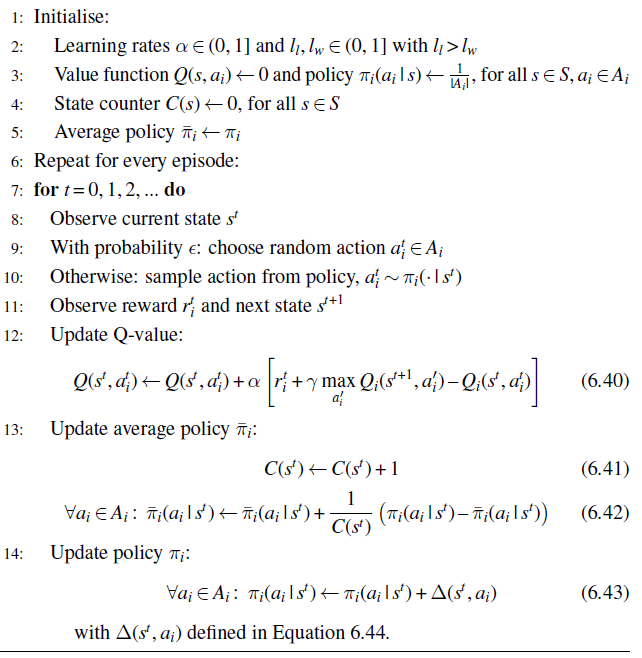
-
In the above,
determines how to move the policy closer to the greedy policy with respect to , calculated as moving probability mass from all non-greedy actions to the greedy actions. We have the following -
The minimum in the definition of
ensures no more of the mass than what was allocated is moved. -
It improves upon fictitious learning by making the policy updates smoother 1
GIGA
-
Generalized Infinitesimal Gradient Ascent (GIGA) generalizes IGA to normal-form games with more than two agents and actions such that we achieve no-regret.
-
Assumption: The past actions of other agents can be observed.
-
Like IGA, we update using the unconstrained gradient, however we use the gradient in terms of the actual rewards after observing the past actions of other agents.
-
The expected reward for an agent
against the actions of the other agents is given as The update rule then becomes the following, using step size
and projection operator that projects the vector to the simplex . Note that is a superscript for the episode -
GIGA achieves no-regret if all agents use a step size of
. In particular the regret is bounded by Where
is the maximum reward the agent can receive. - This implies that the empirical action distribution of agents using GIGA converges to coarse-correlated equilibrium
Links
-
Albrecht, Christianos, and Schafer - Ch 6.4
- 6.4.5 - Contains a discussion of GIGA for the case of two player games.