-
Joint Action Learning uses Temporal Difference Learning to learn estimates of the joint-action value models to estimate the expected returns
-
Here we use something similar to
-learning but for joint action -
JAL-GT is a variant of this where we frame the problem as a Static game
with the reward function being given as. - Learning
then becomes discovering the right game to play
- Learning
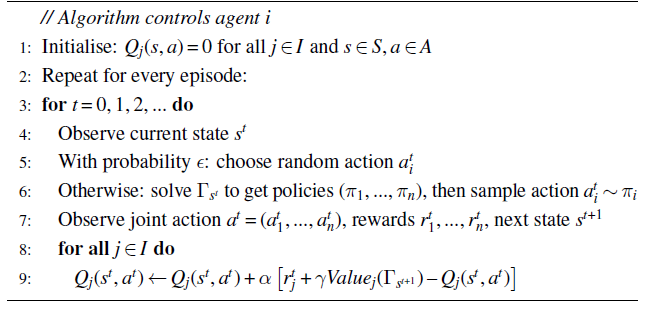
- We solve
using a game theoretic solution concept to obtain the solution — a policy from which - Minimax Q-Learning is guaranteed to learn the unique minimax value of the stochastic game under the assumption of all joint actions and states being tried infinitely often.
- Policies trained under Minimax Q-Learning do not necessarily exploit weaknesses to opponents when they exist.
- At the same time, Minimax policies are robust to exploitation by assuming a worst-case opponent during training
- Nash Q-Learning is guaranteed to learn a Nash equilibrium and is applicable to general-sum games but it is very restrictive
- It requires that all joint actions and states being tried infinitely often, and all normal-form games either
- Have a global optimum where each agent individually achieves its maximum possible return ; or
- Have a saddle point in which if any agent deviates, then all other agents will receive a higher expected return.
- These assumptions bypass the equilibrium selection problem since in either a global optimum or a saddle point, the expected return of each agent is the same.
- Implicitly, we have that agents consistently choose either global optima or saddle points.
- It requires that all joint actions and states being tried infinitely often, and all normal-form games either
- Correlated Q-Learning uses a correlated equilibrium but we need to modify the algorithm so that agents sample from correlated equilibrium
instead - This has an advantage over Nash Q-Learning
- It explores more solutions with potentially higher expected returns
- It can be computed efficiently with Linear Programming
- Convergence to a correlated equilibrium is not guaranteed.
- Equilibrium selection becomes a concern, however this can be mitigated using a protocol to consistently select an equilibrium (i.e., highest welfare)
- This has an advantage over Nash Q-Learning
- Minimax Q-Learning is guaranteed to learn the unique minimax value of the stochastic game under the assumption of all joint actions and states being tried infinitely often.
Limitations
-
JAL is not applicable to certain games since information in the joint action value model
is insufficient to construct an equilibrium policy. The limitations come in finding a deterministic equilibrium but for a game where many stochastic equilibria exist instead. -
A stationary equilibrium is one which is not conditioned on the state
rather than the history . s -
No Stationary Deterministic Equilibrium Theorem (Zinkevich, Greenwald, and Litman (2005) )
Let
- Specific action probabilities may not be computable using
functions alone