-
Proposed by 1
-
Interactions within the population of agents are approximated by those between a single agent and the average effect from the overall population or neighboring agents.
-
It aims to address non-stationarity and convergence of MARL problems and the instability of various MARL approaches.
-
The
function is factorized using only pairwise local interactions. Let be the index set of the neighboring agents of agent as defined by the problem. -
The pairwise interaction
is approximated using Mean Field Theory. Let
be represented using a one-hot encoding of each of the possible actions. The mean action denoted
based on neighborhood is defined as follows Where
is a small perturbation to the mean action. -
The
function can then be expressed as Where
Essentially
acts as a random variable which serves as a small perturbation near zero. -
Assuming all agents are homogeneous, the remainders cancel and give us the following approximation
That is the pairwise interactions are simplified to be between
and a virtual mean agent (from the mean effect of all of ’s neighbors). -
The mean-field
function is updated as follows -
The MARL problem is thus converted to finding
’s best response with respect to the mean action of all its neighbors. -
The policy
can be defined using the virtual mean agent as -
For Policy Gradient Methods we minimize the loss function
Where
is the target mean value.
The gradient is then given by
-
For actor critic methods, the gradient of the actor is trained with the gradient
- 2 introduces a mean field approach to the problem of cooperative team-based MARL with infinitely many agents — The General-Sum LQ Mean-Field Type Game (GS-MFTG). The paper also develops the corresponding Multi-Player Receding-Horizon Natural Policy Gradient (MRPG)
-
Assume The LQ setting where agent dynamics are linear and costs are quadratic. This is to simplify things.
Agents are grouped into
teams. Each team has agents and team in team has linear dynamics — that is, it is driven by a linear function of the agent state, action, and mean state and actions of population . We term this setting as Cooperating-Competing (CC). In particular, the dynamics in the setting is given by Where each
are matrices of appropriate size. and represents noise and represents common noise. Actions for the
-th agent in team is denoted and denotes the adversarial input of player into the dynamics of in . The objective is the following for the team (and the
-th agent). Here, the ’s are positive definite and are positive semi-definite symmetric matrices. We also assume the mean field setting. The game itself is termed a Mean Field Type Game with the GS-MFTG its limit.
We denote
as the set of all policies causally adapted to the state and mean field process for agent . We will also use, for notation,
pertaining to the -th agent for the -th team. -
Define
see Quadratic Form. -
The Nash Equilibrium of the MFTG is an
-Nash for the finite agent CC game where . We have that -
We decompose the MFG into two parts
Where
The above shows that we can decouple the dynamics in the setting as the mean-field setting and the deviation from the mean-field.
-
-
We use the Hamilton-Jacobi-Isaac equations to solve the Nash Equilibrium:
For
and . Here is the partial cost of agent and is the set of policies for all agents from time to . We use the Natural Policy Gradient (NPG) to perform the minimization using the approximator . In fact, because of the LQ conditions,
. -
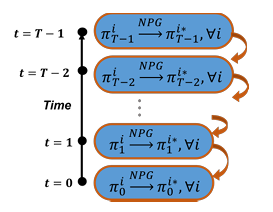
The key idea is as follows For the deviation dynamics: find the policies for all agents at a fixed time
and move backwards in time. For the mean field dynamics: find the policies for all agents at a fixed time
and move forwards in time . -
At each time step
, solve for the set of controllers at time , which minimize the cost while keeping fixed. More specifically, for process above, choose an arbitrary agent (say agent ) and: For
, we calculate the set of controllers by minimizing the cost while keeping fixed. More specifically, for , we have: -
The algorithm proceeds using gradient descent. In particular, we use the Natural Policy gradient. In particular, if we assume that
and Where the gradients are calculated as follows (the calculation for
) is done similarly Where
is a perturbation and is a controller set perturbed at time
.
-
-
-
3 gives an approximation bound for applying Mean Field Control to the case of cooperative Heterogeneous MARL problems where we have a collection of
agents segregated into agent types, with agents of each type. We denote and as the action and state space of each agent The bounds are given below, dependent on what the reward and transition dynamics of all agents are a function of:
- The joint state and action distributions across all classes
- The individual distributions of each class
- The marginal distribution of the entire population. We define
as proportionality constants.
- The joint state and action distributions across all classes
Footnotes
-
Yang et al. (2018) Mean Field Multi-Agent Reinforcement Learning ↩
-
Zaman, Koppel, Lauriere, and Basar (2024) Independent RL for Cooperative-Competitive Agents: A Mean-Field Perspective ↩
-
Mondal et al. (2021) On the Approximation of Cooperative Heterogeneous Multi-Agent Reinforcement Learning (MARL) using Mean Field Control (MFC) ↩