-
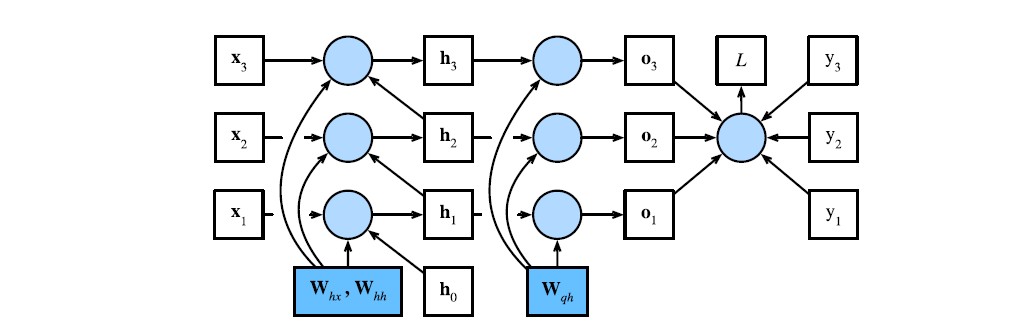
Backpropagation through time is a method for training RNNs by “unrolling” the network along its temporal dimension.
- In practice, of course, we unroll up to what is feasible for our hardware.
-
Because of this training method, RNNs are susceptible to Vanishing and Exploding gradients.
-
RNNs are also more susceptible to local optima.
Analysis of Gradients
-
Let
be a hidden state be an input be an output for time step of some sequential data Also let
, , be the weight parameters be the loss. -
By the recursion we have that
-
The loss function can be evaluated as
-
Performing BPTT will involve calculating
Next, from the above we recall that
. We have Next, we compute for
. If then the chain rule simplifies since only depends on so If
, then depends on via and . Now, by chain rule, we can recursively compute the gradient as And condensing the above by flattening the recursion, we may obtain
Finally, we get
And
-
Note that
is both numerically unstable and expensive to compute
Gradient Clipping
-
We can mitigate gradient issues in Backpropagation through time with Gradient Clipping.
-
Assume we have an objective function
that is Lipschitz continuous with constant We have by definition
Updating parameter values using Gradient Descent means that we have for learning rate
and gradient So that the objective function cannot change by more than the RHS of the inequality above.
In Gradient Clipping, therefore, we limit
. -
There are a few approaches to this
-
Limit the learning rate. The downside is that it will take longer for the model to train since we have a smaller learning rate. This is especially true if the gradient rarely blows up.
-
The Gradient Clipping Heuristic can be used especially if gradient values are rare.
We project the gradient onto a ball of radius
. That is, in the above, we set to be - This allows us to limit the effect of any given minibatch during training.
-
-
One upside is that we mitigate the problems of exploding and vanishing gradients.
-
One downside to clipping is that we limit the speed at which we reduce the values of our objective function.
-
Another downside is that it is harder to analyze the side effects of applying this technique since we no longer follow the true gradient.
Truncated BPTT
- Truncated BPTT is a variation of BPTT where, when applying the chain rule to the recurrence in an RNN, we stop the calculation once we reach
where denotes a hidden state and denotes the corresponding weights. - This leads to an approximation of the gradient
- The model becomes more stable since it focuses only on short term influences rather than long term consequences.
Randomized Truncated BPTT
-
Randomized Truncated BPTT extends Truncated BPTT.
-
The algorithm initially follows truncated BPTT. However, after a certain point, we replace the calculation of
with a random variable whose expectation matches that of the gradient. -
We do this with a sequence
with predefined values . Where That is, we choose either a value
or at time step , and also determines the probability of choosing . The effect is that we randomly truncate the calculation of the gradient, and at the same time we calculate a weighted sum of sequences where long sequences are appropriate overweighted.
We then calculate the gradient as
Teacher Forcing
- Teacher Forcing is a training technique which involves feeding the observed sequence values back to the RNN after each step. This forces the RNN to stay close to the ground truth sequence.
- Intuition: Rather than having the model commit mistakes that accumulate, for each entry in the sequence, we tell the model if it was correct, and regardless, we give it the correct answer.