Soft Q Learning
-
Aims to learn maximum entropy policies 1. It expresses the optimal policy via a Boltzmann distribution (using the property that Boltzmann distributions maximize entropy).
-
Instead of learning the best way to perform the task, the resulting policies try to learn all of the ways of performing the task
-
We reframe the task as finding the optimal policy
such that Where
is the temperature parameter for balancing reward and entropy. -
Policies are represented as
Where
is an energy function. -
(Haarnoja Thm. 1) Let the soft
function and soft function be defined as The optimal policy for maximum entropy RL is given as
-
Soft Bellman equation (Haarnoja Thm. 2)
-
Soft Q-iteration (Haarnoja Thm. 3) The following is a soft version of Bellman Backup
Assume that
and are bounded , and exists Then we can perform the following fixed point iteration to converge to
and -
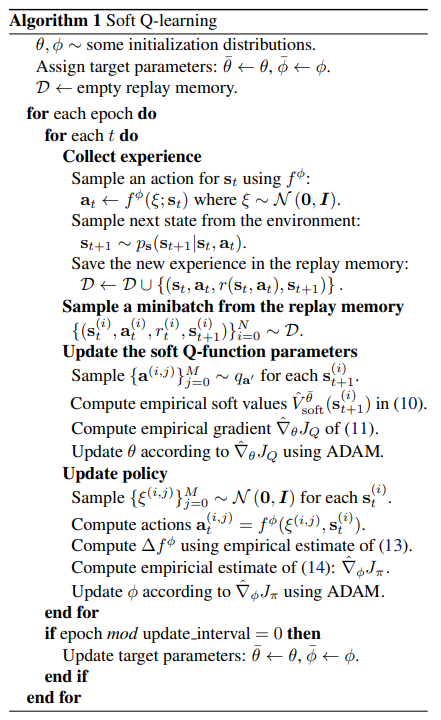
A stochastic version involves optimizing via Importance Sampling using
as an arbitrary distribution over action space. We compute and a general loss function as follows The stochastic version is computed using Approximate Sampling and Stein Variational Gradient Descent
SAC
-
Soft Actor Critic [^Haarnoja _2018] Extends Soft Q Learning by having an actor also maximize both expected reward and entropy. To succeed in performing a task while performing as randomly as possible. This approach is very stable and can achieve SOTA performance on continuous tasks.
- Previous methods such as Trust Region Policies require new samples to be collected for each gradient step, which becomes expensive as tasks become more complex.
- Using DDPG, while sample efficient, is challenging to use due to extreme brittleness and hyperparameter sensitivity.
- Soft Q Learning requires complex approximate inference procedures in continuous action spaces.
-
SAC relies on three components
- An actor-critic architecture with separate policy and value function networks. The actor itself is stochastic.
- An off policy formulation that enables reuse of previously collected data for efficiency
- Entropy maximization to enable stability and exploration.
-
Soft Policy Evaluation (Haarnoja Lem. 1) - Let
where . Let . The sequence converges to the soft value of as . In other words, we can compute the soft value using repeated applications of the soft Bellman operator. -
We restrict the choice of policy
to be in some set of policies . TO that end, we use the KL Divergence. Thus, for each improvement step, we update according to Where
is a partition function that normalizes the distribution, but can largely be ignored. -
Soft Policy Improvement (Haarnoja Lem. 2) Let
and be as defined above. Then and where we have that -
Soft Policy Iteration (Haarnaja Thm. 1) repeated application of soft policy evaluation and soft policy improvement from any
converges to a policy , assuming . is the optimal policy among all . - In other words, we can generalize GPI for soft RL.
-
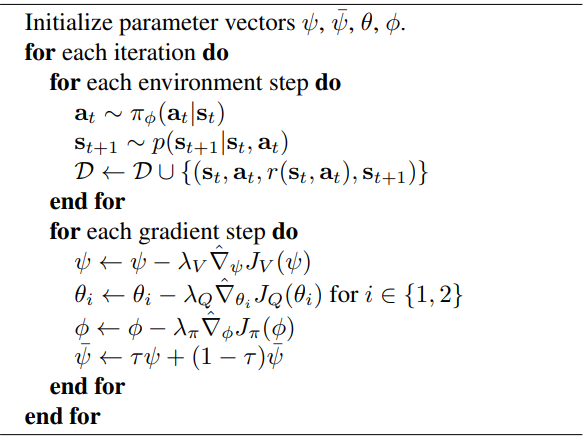
Soft Actor-Critic 2 approximates Soft Policy Iteration by using Function Approximation using
-
A parameterized state value function
to approximate the soft value. This helps stabilize training, even if strictly speaking there is no need for this. Its goal is to minimize the squared residual error using the distribution of previously sampled states and actions
. -
A soft
-function which is trained to minimize the soft Bellman residual Where
is a target value network. We optimize the above with stochastic gradients -
A Tractable policy
This is learned by minimizing the expected KL divergence given by Optimizing requires reparameterizing the policy using a neural network transformation since the target is a differentiable neural network
is an input noise vector. With this, the objective can be written as follows. is evaluated at
-
-
We use two Q-functions in a similar manner to double Q. This speeds up training.
Links
Footnotes
-
Haarnoja, Tang, Abbeel, and Levine (2017). Reinforcement Learning with Deep Energy-based Policies ↩
-
Haarnoja, Zhou, Abbeel and Levine (2018) Soft Actor Critic—Off Policy Maximum Entropy Deep Learning with a Stochastic Actor ↩